Морская робототехника военного назначения
Морская робототехника военного назначения
Важнейшим направлением развития мировой цивилизации в третьем тысячелетии стало освоение ресурсов Мирового океана. России этот регион интересен не только с точки зрения освоения природных ресурсов Мирового океана, но и в плане обеспечения национальной безопасности страны.

Иллюстрация «сетецентрического пространства»
В Российской Федерации актуальность вопросов, связанных с освоением подводного пространства и ресурсов Мирового океана, определена в утвержденной Президентом РФ «Концепции развития глубоководных сил и средств Российской Федерации на период до 2021 года». Основные направления развития боевых действий на море связаны с реализацией концепции «сетецентрического пространства» на основе применения сетевых технологий передачи информации, в том числе и с использованием развитой подводной инфраструктуры. В ключевых районах Мирового океана должны быть развернуты системы надводного и подводного наблюдения, интегрированные с системами связи и носителями морского оружия в единую информационную сеть. В качестве основных элементов информационной сети, наряду с традиционными силами (корабли, самолеты, подводные лодки), рассматриваются робототехнические комплексы на основе беспилотных летательных аппаратов (БЛА), необитаемых подводных аппаратов (НПА) и безэкипажных катеров (БЭК), а также оперативно-развертываемое. преимущественно с подводных носителей, донное оборудование различной номенклатуры и назначения.
На вооружении ведущих иностранных государств уже состоят подводные робототехнические комплексы (РТК), которые выполняют задачи освещения подводной обстановки, обнаружения и уничтожения мин, активно ведутся работы по созданию подводных аппаратов, способных нести оружие. Поэтому в процессе планирования развития ВМФ должны учитываться общемировые тенденции создания и использования робототехнических комплексов для ведения вооружённой борьбы на море.
В настоящее время существует ряд проблем нормативно-организационного характера, которые сдерживают развитие подводной робототехники:
1) отсутствие нормативной базы как в области разработки и применения робототехнических комплексов;
2) отсутствие специализированного сектора в отрасли оборонно-промышленного комплекса;
3) отсутствие института Генерального конструктора. ответственного за практическую реализацию государственной технической политики в области развития подводной робототехники;
4) отсутствие постоянно действующей полигонной базы на территории РФ для испытания образцов РТК и практической отработки тактических приемов их применения;
5) несовершенство системы межведомственного обмена информацией о результатах научных исследований и технологических разработках в области подводной робототехники.
Рассмотрим некоторые пути решения указанных проблем.
Автоматизация планирования развития морских РТК
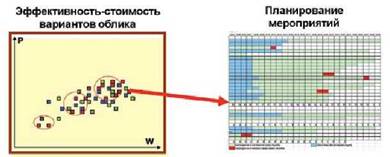
Программно-целевое планирование развития морских РТК
Программно-целевое планирование построено по логической схеме «цели – пути – средства». Применительно к развитию РТК:
• цели – потребности флота;
• пути – модели применения морских РТК;
• средства – номенклатура и ТТХ РТК.
Автоматизация планирования развития морских РТК подразумевает реализацию информационно-аналитической системы, позволяющей решать задачи:
• определения места разрабатываемой МРС в составе ВМФ;
• разработки оперативно-тактических моделей использования МРС;
• разработки моделей применения НПА, БЭК, БЛА и проведения исследовательского моделирования;
• определение направления развития и оптимального состава разрабатываемых МРС;
• определение состава вооружения для разрабатываемых перспективных МРС;
• формирование планов развития морских РТК;
• сравнительная оценка военно-экономической эффективности программ и планов создания РТК;
• контроль выполнения планов развития РТК.
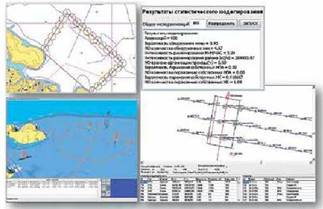
Комплекс моделирования морских роботизированных систем
Одним из ключевых вопросов планирования развития РТК является моделирование функционирования и способов применения перспективных РТК. Создание комплекса моделирования позволит выполнять:
• расчет, оценку и анализ эффективности вариантов построения МРС для решения поставленных задач;
• разработку типовых формализованных описательных моделей применения;
• оценку и анализ различных тактических приемов совместного использования различных видов РТК при решении частных задач флота;
• отработку режимов работы и логики (тактики) функционирования системы управления морскими РТК;
• обоснование тактико-технических требований;
• оценку достижимых тактико-технических характеристик перспективных РТК.
Учебно-тренировочные комплексы
Важный вопрос эффективного применения РТК – разработка соответствующих средств обучения и подготовки операторов для управления им. Существующие тренажеры имеют ряд существенных недостатков, которые не позволяют использовать их при обучении оп ераторов РТК военного назначения.
В ОАО «ЦНИИ «Курс» создан опытный образец учебно-тренировочного комплекса опереторов телеуправляемого необитаемого подводного аппарата (ТИПА), на базе которого возможно создание тренажеров операторов подводных РТК.
Основные преимущества комплекса:
1 использование штатных пультов управления ТИПА;
2. возможность добавлять новые типы ТИПА, операторы которых проходят обучение на тренажере;
3. возможность изменять конструкцию ТИПА с сохранением адекватности работы модели (навесное оборудование);
4. самостоятельное формирование инструктором сцен для тренировок;
5 возможность менять параметры внешней среды в процессе прохождения миссии операторами;
6 автоматизированная оценка действий операторов и формирование отчета;
7. запись и последующее воспроизведение прохождения операторами миссии;
8. моделирование процессов воздействия течения на динамику ТИПА, планктон, растительность на дне;
9. адекватная отработка внешних воздействий;
10. наличие справочной информации об устройстве и правилах эксплуатации ТИПА.
Комплекс моделирования морских роботизированных систем
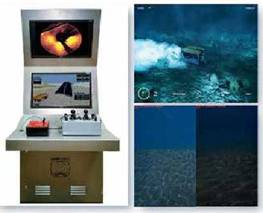
Внешний вид и экранные формы учебно-тренировочного комплекса операторов ТН ПА
Нормативно-методические материалы
В ОАО «ЦНИИ «Курс» (в рамках СЧ ОКР «Робот-Норма-К») разработан Проект единой системы нормативной базы документов (ЕСНБД), регламентирующих процессы разработки, испытаний и применения НПА в части, касающейся радиоэлектронных систем подводной робототехники, состоящий из проектов следующих стандартов:
• «Необитаемые подводные аппараты. Автономность и управление»;
• «Телеуправляемые подводные аппараты (ТН ПА)»;
• «Необитаемые подводные аппараты. Физический интерфейс полезной нагрузки».
В проекте стандарта «Необитаемые подводные аппараты. Автономность и управление» предлагается классификация автономных НПА и вводится единая терминология в области разработки подводной робототехники. Основное внимание уделено особенностям функционирования подводного аппарата в автономном режиме, устанавливаются критерии оценки уровня автономности подводных аппаратов, предлагается функциональное разделение подсистем системы управления НПА, перечислены и описаны функциональные возможности НПА, которые в той или иной степени должны быть реализованы в автономных аппаратах гражданского или двойного назначения. Кроме того, в стандарте установлен перечень элементарных команд, доступных для различных НПА.
Проект стандарта «Телеуправляемые подводные аппараты (ТНПА)» содержит терминологические статьи, вводит подробную классификацию телеуправляемых подводных аппаратов, устанавливает перечень проектной документации, которая должна быть создана на этапах разработки ТНПА,Технические требования стандарта касаются конструкции, электрооборудования, основных подсистем аппаратов (движитепьно-рулевого комплекса, устройств управления, манипуляторов, «поверхностного» оборудования – пульта управления и системы энергообеспечения ТНПА, оборудования спуска и подъема).
Проект стандарта «Необитаемые подводные аппараты. Физический интерфейс полезной нагрузки» регламентирует характеристики модулей полезной нагрузки автономного НПА. Нормативный документ предназначен для предоставления разработчику параметров, необходимых для интеграции различных комбинаций системных компонентов и модулей полезной нагрузки, определяемых миссией аппарата. В то же время он не конкретизирует модели и виды специального оборудования и не ограничивает возможность использования новых образцов оборудования для подводной робототехники Стандарт определяет физические характеристики модулей полезной нагрузки, включая максимальные массогабариты модулей и содержит требования к механическим и электрическим разъемным соединениям модулей полезной нагрузки, конструктивные требования, требования к наличию и построению собственной системы управления модуля, а также ее взаимодействия с системой управления самого аппарата, При этом решения по выборутаких параметров системы управления модуля полезной нагрузки, как аппаратная реализация, операционная система и язык программирования, стандартом не ограничены.
Л.М. КЛЯЧКО, д. т. н., председатель НЭС Морской коллегии, генеральный директор ОАО «ЦНИИ «Курс», ОАО «Концерн «Моринформсистема – Агат» В.В.ХАНЫЧЕВ. к. т. н., зам. ген. директора ОАО «ЦНИИ «Курс», ОАО «Концерн «Моринформсистема – Агат»

Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
УЧЕТ ФОНДОВ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
УЧЕТ ФОНДОВ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ Фонды специального назначения образуются из чистой прибыли предприятия и за счет взносов учредителей. Фонды специального назначения – это фонд накопления, фонд потребления и фонд социальной сферы.Первый из них – фонд накопления –
2.3. Условия назначения трудовой пенсии
2.3. Условия назначения трудовой пенсии Для разных категорий граждан трудовая пенсия начисляется по разным основаниям.Трудовая пенсия по старости назначается при достижении пенсионного возраста (мужчины – 60 лет и женщины – 55 лет). Население старше пенсионного возраста
8.1. Сроки назначения трудовой пенсии
8.1. Сроки назначения трудовой пенсии Подавать заявление о назначении пенсии лучше заблаговременно и желательно со всеми необходимыми документами, которые заранее должны быть подготовлены. Для того чтобы трудовая пенсия по возрасту или выбранная пенсионером часть этой
11.4. Порядок назначения государственных пенсий
11.4. Порядок назначения государственных пенсий В соответствии с Федеральным законом «О государственном пенсионном обеспечении в Российской Федерации» различаются следующие виды пенсий:• пенсия по старости;• пенсия по инвалидности;• пенсия по случаю потери
12.4. Порядок назначения пенсии за выслугу лет
12.4. Порядок назначения пенсии за выслугу лет Существующая практика показывает, что вопросами представления работников к назначению пенсий по старости, по инвалидности, за выслугу лет и по случаю потери кормильца занимаются кадровые службы государственных органов,
«Rolex» и морская пехота
«Rolex» и морская пехота Какое отношение к понятию бренда имеют поддельный «Rolex» и Корпус морской пехоты?Самое прямое. Когда-то мой богатый папа растоптал фальшивый «Rolex» и я впервые понял, что такое настоящий бренд. Я осознал, какое значение он имеет в жизни. Теперь я
§ 7. От “военного коммунизма” к нэпу
§ 7. От “военного коммунизма” к нэпу Ключевым для судьбы революции был вопрос снабжения армии и городов продовольствием; от его решения зависело, какие политические силы выйдут из революции победителями. Чтобы обеспечить поставки зерна хотя бы на минимальном
«ОРГАНИЗАЦИЯ ВОЕННОГО КОНФЛИКТА МЕЖДУ РОССИЕЙ И ЕВРОПОЙ ДЛЯ США НАИБОЛЕЕ ЖЕЛАТЕЛЬНА»
«ОРГАНИЗАЦИЯ ВОЕННОГО КОНФЛИКТА МЕЖДУ РОССИЕЙ И ЕВРОПОЙ ДЛЯ США НАИБОЛЕЕ ЖЕЛАТЕЛЬНА» Организовав государственный переворот и установив полный контроль над структурами украинской государственной власти, Вашингтон делает ставку на превращение этой части Русского мира
Армия накануне зарождения военного сословного самосознания
Армия накануне зарождения военного сословного самосознания Генеральские золото погонные мундиры постепенно вытесняют из окружения Президента костюмы штатских. Меняется и стиль поведения руководства силовых ведомств. Начальник дворцовой охраны Кремля, за ним
Морская доктрина Российской Федерации на период до 2030 года
Морская доктрина Российской Федерации на период до 2030 года Проект, предлагаемый на утверждение Президенту Российской Федерации В. В. Путину (Публикуется в сокращении) I. Общие положенияМорская доктрина Российской Федерации (далее – Морская доктрина) является
13. Прибыльные стратегии назначения ставок
13. Прибыльные стратегии назначения ставок Ваш аккаунт AdWords прибылен или убыточен? Чтобы это узнать, нужно сначала понять цели ваших маркетинговых инициатив, чтобы рекламная кампания стала прибыльной. Далее нужно выбрать способ их измерения. Только после этого можно
Варианты назначения ставок в AdWords
Варианты назначения ставок в AdWords В AdWords есть несколько методов назначения ставок. Установка максимальных цен за клик (назначение цены за клик вручную) используется по умолчанию. Однако для ваших целей могут лучше подойти другие методы.Эти параметры доступны в разделе
Прибыльные стратегии назначения ставок
Прибыльные стратегии назначения ставок При использовании метода назначения ставок на основе максимальной CPC приходится определять величины самостоятельно. Ниже описано несколько стратегий. Вы можете назначить ставки в нескольких разделах вашего аккаунта:• группы
СЕО мирного и военного времени
СЕО мирного и военного времени СЕО мирного времени знает, что следование правильной процедуре обеспечивает победу. СЕО военного времени нарушает любую процедуру, чтобы победить.СЕО мирного времени сосредоточивается на глобальной картине и передает полномочия принятия
Можно ли сочетать свойства СЕО военного и мирного времени
Можно ли сочетать свойства СЕО военного и мирного времени Может ли СЕО выработать в себе навыки, необходимые для управления компанией как во время войны, так и во время мира?Вы можете с легкостью доказать, что я потерпел неудачу как СЕО мирного времени, но зато преуспел