Приложение C ШУМЫ
Приложение C
ШУМЫ
При работе с моделями замкнутых информационных систем необходимо четко понимать природу и происхождение шумов. Функции принятия решений, которые мы можем сформулировать, объясняют только главные факторы, влияющие на основные потоки. Многочисленные явления возникают за пределами изучаемой системы. Как отмечалось ранее в приложении В, наличие шумов, то есть случайных явлений, требует выравнивания, сглаживания данных, что в свою очередь вызывает запаздывания. Как видно из рис. 13–20 и 15-5, шумы порождают такие возмущения, к которым система чувствительна. Специальное исследование показывает, что шумы ограничивают возможность прогнозирования будущего состояния системы.
В данной книге мы решили начинать построение моделей с рассмотрения непрерывных, свободных от помех потоков информации, решений и действий. После того как изучена динамика системы при отсутствии помех, шумы могут быть введены дополнительно с тем, чтобы показать влияние случайных явлений на поведение системы. Такой порядок изучения отличается от подхода, принятого при рассмотрении стохастических моделей, в которых решения сформулированы так, чтобы создать последовательности отдельных событий, статистическая вероятность свершения которых может определяться состоянием системы. Автор считает, что, изучая вначале систему, свободную от помех, можно легче понять, каким образом основная структура системы определяет ее действия.
Когда мы будем готовы ввести составляющую шума в решения системы, мы должны четко представлять методологию того, как выполнить эту работу. Как следует определять шумы? Какие характеристики шумов интересуют нас? Сигнал шума несет мощность в широкой полосе частот.
Известно множество различных категорий шумов. В физических науках термин «белый шум» применяется для описания непрерывной функции, которая характеризуется равномерным распределением энергии по всему спектру частот от нуля до бесконечности, а плотность распределения вероятностей удовлетворяет Гауссову распределению. Белый шум является непрерывным сигналом, имеющим бесконечную мощность источника, и он может иметь мгновенные значения бесконечно большими; значение его в данный момент ничего не говорит о его значении в следующий момент времени даже через бесконечно малый интервал времени.
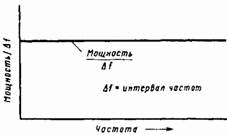
Рис. С-1. Белый шум имеет постоянную величину мощности, отнесенной к интервалу частоты.
Говоря о постоянной спектральной плотности, как это имеет место в случае белого шума, мы подразумеваем, что мощность одинакова в любой полосе частот конечной ширины, независимо от того, где эта полоса расположена (см. рис. С-1). Например, в широкополосном электронном генераторе шумов была бы замерена одинаковая мощность после того, как мы пропустили шум через фильтр с полосой пропускания 1 тыс. гц, который перекрывал диапазон частот от 1 тыс. гц до 2 тыс. гц, и после того, как мы пропустили бы шум через фильтр с диапазоном частот от 1111 тыс. гц до 1112 тыс. гц. Следует отметить, что величина мощности шума в белом шуме определяется шириной полосы пропускания частот, а не отношением нижней границы частоты к верхней. В первом примере верхняя граница частоты полосы пропускания вдвое больше нижней границы. Во втором примере эта разница составляет менее 0,1 %. Мощность шума одинакова в каждой полосе частот одной и той же абсолютной ширины, но различна в полосах частот, измеряемых в октавах. (Октава представляет полосу частот, у которой верхняя граница вдвое больше нижней частоты.) Для источника белого шума мощность шума на октаву удваивается с каждой более высокой октавой (см. рис. С-2). Например, предположим, что 1 единица мощности замерена в октаве, перекрывающей диапазон от 1 тыс. гц до 2 тыс. гц. Тогда если шум исходит от источника белого шума, то в октаве с 2 млн. гц до 4 млн. гц будет заключено 2 тыс. единиц мощности.
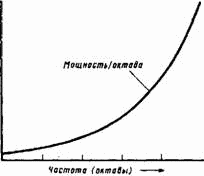
Рис. С-2. Белый шум, показывающий экспоненциальное увеличение мощности, отнесенной к октаве.
Белый шум характеризуется определенным распределением значений мощности в некотором диапазоне частот, но оно вовсе не обязательно будет описывать именно тот тип шума, который мы хотим включить в рассмотрение. Мы должны теперь увязать понятия белого шума и мощности шума с задачей использования шумов в моделях социальных систем.
В действительности генератор белого шума создать невозможно, ибо он должен обладать бесконечно большой мощностью и генерировать любые частоты. Однако можно осуществить достаточно близкое приближение к такому генератору, обеспечив генерирование белого шума в определенных диапазонах частот. Одной из точек зрения относительно сигнала шума является его представление в виде ряда дискретных случайных чисел. Эти числа могут быть распределены с равными промежутками времени. Исходя из этого, мы можем рассматривать непрерывный сигнал шума как кривую, соединяющую эти величины (рис. С-3). Форма кривой, изображенной на рис. С-3, является хорошим приближением к белому шуму вплоть до области частот, периоды которых вдвое больше интервала между дискретными импульсами шума. Другими словами, самая высокая частота, которую следует отразить в кривой, соединяющей серию случайных значений, равномерно распределенных во времени, составляет половину той частоты, с которой появляются сами случайные импульсы (данные).
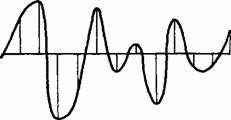
Рис. С-3. Равномерно расположенные случайные числа и непрерывная кривая шума.
Ряд равномерно распределенных случайных чисел можно легко использовать в качестве источника шума при работе с моделями социальных систем. Но будет ли этот источник отображать обусловленные принятием решений возмущения, которые мы хотим изучить? Здесь возникает та же проблема, что и при выборе других взаимосвязей в модели и ее параметров. Нас интересуют источники шумов, отражающие характер возмущений, которые, как мы считаем, существуют в действительной системе. Произвольный выбор ряда случайных чисел не дает уверенности в том, что данный метод удовлетворяет поставленной задаче. Каким должно быть среднее отклонение? Какой должна быть мощность шума в зависимости от распределения частот? Как часто следует производить выборочные замеры шумов. Насколько уязвимы наши суждения в отношении состава шумов?
К счастью, те выводы, которые мы собираемся получить на основе изучения моделей, не очень чувствительны к различным категориям используемых сигналов шума. Однако следует обратить внимание на некоторые общие положения и рекомендации.
Сигнал шума, представленный в виде ряда случайных чисел, как это изображено на рис. С-3, близок к полученному от источника белого шума при частотах, меньших частоты импульсов. Такой сигнал имеет одинаковую мощность шума при бесконечно малом приращении частоты, но не на октаву. Зрительно наиболее наглядной является форма кривой, описывающей величину мощности в расчете на октаву. Из рассмотрения рис. С-3 мы можем заметить, что мощность шума преобладает при частотах, равных половине частоты импульсов. Мы не видим или не ощущаем низкочастотных составляющих, так как они очень незначительны в единицах мощности на октаву.
Сигнал шума нельзя выбирать как произвольный ряд случайных чисел, поскольку эта процедура позволяет произвольно и полно определить всю спектральную плотность, а она может оказаться непригодной для наших целей. В качестве примера рассмотрим переменную, изменяющуюся по закону случайной функции, представляющую, например, фактор погоды в модели экономической системы или товарного рынка. Допустим далее, что оценку модели следует производить ежедневно. Мы могли бы затем выбирать ежедневно случайные числа, характеризующие количество выпавших осадков. Случайный характер этих данных мог бы потребоваться для воспроизведения суточных изменений возможных осадков. Но этого недостаточно. Случайные данные суточных выпадений осадков должны анализироваться с целью выявления недельных, месячных, годовых и более длительных изменений, поскольку выпадение осадков не является чисто случайным, время от времени происходящим явлением, а имеет определенные закономерности, если речь идет о достаточно продолжительных интервалах времени.
В главах 13–15 использовался простой метод управления мощностью шумов: шумы подавались в систему и поддерживались в течение более длительного интервала, чем интервал решения уравнений. В главе 13 (уравнение 13–79) шумы подавались в модель и поддерживались в течение одной недели; а решение уравнений производилось для каждых 0,05 недели. Допустим, что мы попытались воспроизвести случайные недельные изменения продаж в диапазоне 2 к 1 (но не таких больших размеров, как в главе 13) путем добавления групп случайных чисел, взятых по 20 в группе. Изменения, происходящие из часа в час и изо дня в день, могли бы оказаться нереально большими, иногда даже вызывающими аннулирование числа заказов, превышающего располагаемое, с тем чтобы сделать долговременные изменения достаточно большими.
Когда мы говорим о характере сигнала помех, то особенно важен вопрос частотной избирательности системы. На рис. 15-5 показан сигнал случайной функции, который подается и поддерживается в течение 5 недель. В данном примере самое большое содержание мощности в величинах мощности на октаву приходится на диапазон самых высоких частот, отображенных на рисунке. Это диапазон, составляющий 10 недель, то есть частота равна около 5 периодам в год. Однако эта высокочастотная мощность почти полностью поглощается выравниванием и запаздыванием в системе. Система в целом реагирует на гораздо меньшую энергию шума, отображающего период в два года (или половину цикла за год). Это тот диапазон частот, в котором система обладает усилительными свойствами и амплитуды на выходе превышают амплитуды сигнала шумов на входе.
Следует отметить, что выравнивание подавляет высокие частоты источника шумов, но пропускает низкие частоты. Эти низкие частоты являются составляющими шума, которые авто-коррелируют на протяжении длительных периодов времени.
При оценке переменных, несущих шумы, мы должны проявлять осторожность и различать низкочастотные возмущения, возникающие вне системы (собственно шумы), от внутренне присущих ей частот. По-видимому, невозможно определить путем наблюдения, в какой мере низкочастотные случайные колебания привносятся внешним возмущением, а какая их часть обусловлена вводом, усиленным внутри системы. Мы обычно будем полагаться на наши знания деталей структуры системы при определении чувствительности модели к различным частотам и после этого найдем (как это было сделано в главе 12) такой сигнал помех, который даст амплитуды, наблюдаемые в рассматриваемой системе. Только в тех случаях, когда требуемые сигналы шума оказываются нереально большими, объективные знания природы шумов в реальной системе могут оказаться полезными при определении эффективности модели.
Использование шумов в динамических моделях требует глубокого и детального изучения. В данном приложении отмечены только некоторые важные положения.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Приложение 14
Приложение 14 Приложениек трудовому договору №___ от ___________200__ г.Правила корпоративной этикисотрудников центра красоты и здоровья «_____________»ООО «____________________» (далее по тексту – Центр красоты и здоровья «__________________»), в лице директора ________________________вводит обязательные для
Приложение 15
Приложение 15 Примерный договоркоммерческой концессии (франчайзинг)г. ______________ «________» ____________20___ года_______________________________________________________,(наименование предприятия-правообладателя)именуемое в дальнейшем «Правообладатель», в лице_______________________________________________________,(должность,
Приложение 16
Приложение 16 Договор №____о конфиденциальности и неразглашении информацииг. __________________ «____» ____________200 __года_____________________________________________________,(наименование организации, предприятия, кооператива)именуемое в дальнейшем «Раскрывающая сторона», в лице
ПРИЛОЖЕНИЕ 2
ПРИЛОЖЕНИЕ 2 Автомобили 1996 года выпуска: средняя стоимость на единицу веса (1 фунт = 0,454 кг) Марка и модель Средняя розничная стоимость Вес (в фунтах) Цена доллар/ фунт Показатель относительной стоимости (средняя стоимость – 100) Dodge Ram 17 196 4785 3,59 52 Hyundai Accent 8790 2290 3,84 56 Isuzu Hombre 11
ПРИЛОЖЕНИЕ 3
ПРИЛОЖЕНИЕ 3 Виды деятельности и профессии миллионеров-предпринимателейАгент по продажам Агент по фрахтуАгентство по услугам торговых представителей Арбитраж по трудовым спорам Аудио/видеозапись АукционистАукционист по жилой недвижимости Аукционист-оценщик
Приложение
Приложение Выступление перед комитетом сената США по надзору за торговлей в рамках слушаний по вопросу выработки Федеральной торговой комиссией усовершенствованных регуляционных норм, противодействующих манипуляциям на нефтяном рынке Вторник, 3 июня 2008 года Джордж
Приложение 2
Приложение
Приложение
Приложение Таблица нормального распределения
Приложение 1
Приложение 1 Приложение 3 к приказу Минздрава РФ от 13 ноября 1996 г. № 375Форма № 101-АПФасовочный журнал для аптечных
Приложение 2
Приложение 2 Приложение 13 к Инструкции по приемке, хранению, отпуску, транспортированию и учету этилового спиртаФорма № П-26 Оборотная сторона формы №
Приложение 1
Приложение 1 Системы полнотекстного поискаСегодня рынок предлагает значительный перечень всевозможных поисковых утилит, программ и систем разного уровня. Программное обеспечение этого класса бывает двух типов*. {Градский П. Поисковые системы. // Санкт-Петербургские
Приложение 2
Приложение 2 Пример аналитической справкиНа предприятие К усиленно «наезжает» депутат Энской городской Думы некто Юрий Владимирович Квазимодов. Руководство предприятия ставит задачу своей службе безопасности разобраться в том, с чем же все-таки связано пристальное
Приложение 3
Приложение 3 Роль средств массовой информации в манипулировании общественным мнениемСовременные средства массовой информации полностью контролируют распространение информации, которая определяет наши представления, установки, а в конечном итоге и наше поведение.
Приложение 1
Приложение 1 Татьяна Павлова, «Две любви и трое детей Бориса Немцова» «Комсомольская правда», 24.08.2002На свой день рождения жена лидера СПС получила «подарок». Ей позвонила женщина и сказала: «Я жду ребенка от вашего мужа. Второго».Законный бракРазводили Немцовых часто.
Приложение
Приложение Унифицированная форма № Т-9Утверждена постановлением Госкомстата РФот 5 января 2004 г. № 1 Справка-подтверждениеСтудент Кудасов Виктор Алексееви________________(фамилия, имя, отчество)находился в ГОУ ВПО САМАРСКИЙ ТЕХНИЧЕСКИЙ ИНСТИТУТ(полное наименование высшего